
Release note Software version 5.12.x.x
For e-Series only
Download HERE
SW 5.12.6 RELEASE NOTES
Release Versions:
- UR Software Update: 5.12.6
- URCap Software Platform:
- URCap API: no change
- URCap SDK: no change
- URSim Linux: 5.12.6
- URSim Virtual Machine: 5.12.6
- User Manuals: 5.12.6
- Support Log Reader: 3.13.33
Key Features
Increased allowed torque of the base joint when Tool or Elbow is close to the base singularity
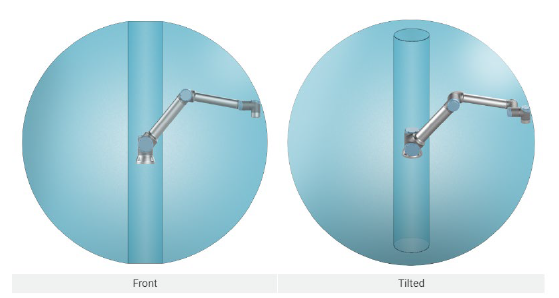
- Like in older software versions, risks of clamping or collisions with the robot should be avoided in the cylinder extending vertically from the base of the robot, see illustration.
- Increased torque allowances improve the robot's resilience against external disturbances, significantly reducing the likelihood of triggering false protective stops, particularly when executing high-speed base rotation movements.
- With a force limit set to the minimum value: behaviour remains unchanged
- Increasing the force limit will gradually increase the allowed torque of the base, and thereby robustness against disturbances
- Robot is able to push with higher forces in force control in some situations (still within safety force limits).
Bug Fixes
PolyScope
- Fixed minor issues in the support for the Teach Pendant with 3-Position Enabling Device.
- Fixed minor issue when switching Operational Mode.
Controller
- Fixed a bug that could cause an unexpectedly fast (and possibly dangerous) robot motion when applying a path offset to an underlying trajectory where the underlying trajectory produces a singularity exception.
- Fixed a bug where is rare circumstance an XML-RPC overflow crashes controller with a segmentation fault.
- Improved the stability of the primary interface connections, especially on congested networks. Temporarily blocked sends will be retried every 1ms for 50 times/ms before dropping the connection.
- Fixed XML-RPC issue where program would occasionally stop with "connection reset" error while calling remove procedure. It occurs in very rare conditions when xml-rpc library internally fails reconnecting to remote server. To mitigate the issue "number_of_retries" parameter was added to rpc_factory with default value 1. Change ensures that script program will try to make one extra attempt to call remote procedure before stopping program.
- Fixed issue of robot not going into Backdrive in Automatic mode with a 3PE TP
SW 5.12.5 RELEASE NOTES
Release Versions:
- UR Software Update: 5.12.4
- URCap Software Platform:
- URCap API: 1.13.0 no change
- URCap SDK: 1.13.0 no change
- URSim Linux: 5.12.4
- URSim Virtual Machine: 5.12.4
- User Manuals: 5.12.4
- Support Log Reader: 3.13.33
Bug Fixes
Embedded
- Removed the fault on G4 bootup for ADC calibration deviation.
SW 5.12.4 RELEASE NOTES
Release Versions:
- UR Software Update: 5.12.4
- URCap Software Platform:
- URCap API: 1.13.0 no change
- URCap SDK: 1.13.0 no change
- URSim Linux: 5.12.4
- URSim Virtual Machine: 5.12.4
- User Manuals: 5.12.4
- Support Log Reader: 3.13.33
Bug Fixes
PolyScope
- Fixed issue where in some rare situations the robot would move to wrong joint positions (with incorrect rotation) when a Pallet node using an irregular pattern
ControlleR
- Fixed the speedl() built-in function to control the speed in the Cartesian domain. Before it was using one extra time step, which resulted in poor performance as well as an annoying sound.
- Fixed the issue where 24V Analog outputs are active on PolyScope booting
- Fixed the issue where freedrive_mode() built-in function throws an exception like "Arguments 'a' and 'v' must be positive"
- Fixed an issue where global and installation variables could get a wrong value for a fraction of a second at program start up.
- Fixed an issue where variables stopped updating until the controller was restarted. It could manifest as a blank variable pane if the program was reloaded in PolyScope.
SW 5.12.2 Release Notes
Release Versions:
- UR Software Update: 5.12.2
- URCap Software Platform:
- URCap API: 1.13.0 (no change)
- URCap SDK: 1.13.0 (no change)
- URSim Linux: 5.12.2
- URSim Virtual Machine: 5.12.2
- User Manuals: 5.12.2
- Support Log Reader: 3.13.33
Key Features:
PolyScope GUI
- Unlock all protective stops through the dashboard server, except 'Too Many Protective Stop Within Last 8 Hours(C163)', without delay.
- Pallet (Palletizing) node:
- Fixed issue where the screen for the Layers node was not properly updated when adding or removing a layer
- Fixed issue where cut and paste of a Pallet node would result in changed names of the Pallet node and the Pallet variables
URCap Software Platform
URCap API:
URCap SDK:
Controller
- Count protective stops C153, C157, C158, C159, C162 for the last 8 hours. The limit is 50 for each joint. If it reaches the limit, then C163 - 'Too Many Protective Stop Within Last 8 Hours' will be shown on PolyScope.
Embedded
Bug Fixes
PolyScope GUI
- Improved for clarity the Chinese translation of "unexpected stop"
Controller
Fixed "Missing sanity check for set_gravity()" the input for the function shall be withing +/- 20 m/s^2 otherwise argumentOutOfRangeException will happen, if NaN or Infinity is passed as an input the invalidArgumentValueException will be activated.- Fixed "No Controller issue when a non-existing control command is run" there were nullptr dereferences in case of not correctly formed commands. nullptr guards were added.
- Fixed the issue of "flow of robot program return to start", there was need of check for the return value in the case of conditional statement.
SW 5.12.0 Release Notes
Release Versions:
- UR Software Update: 5.12.0
- URCap Software Platform:
- URCap API: 1.13.0 (no change)
- URCap SDK: 1.13.0 (no change)
- URSim Linux: 5.12.0
- URSim Virtual Machine: 5.12.0
- User Manuals: 5.12.0
- Support Log Reader: 3.13.33
Key Features
PROFIsafe
This software release introduces the fail-safe communications interface, PROFIsafe.
The PROFIsafe interface allows robot to exchange messages with a Safety PLC regarding stops, operating mode, and other conditions.
PROFIsafe is available as a licensed software feature. A license must be purchased from an authorized distributor, then activated in the myUR portal for a specific robot serial number. Part number for a PROFIsafe license is: 000201. PROFIsafe is compatible with all e-Series robots running PolyScope 5.12 and above, regardless of age.
| The following fail-safe signals can be asserted or read by the Safety PLC | |
|---|---|
|
PLC to Robot
|
Robot to PLC
|
Refer to the User Manual for further details.
A technical guide is available at our Support Site (https://www.universal-robots.com/articles/ur/interface-communication/profisafe-technical-guide-for-e-series/).
PROFIsafe configuration
This release introduces a new Safety installation screen for configuring the robot to use PROFIsafe to communicate with a safety PLC.
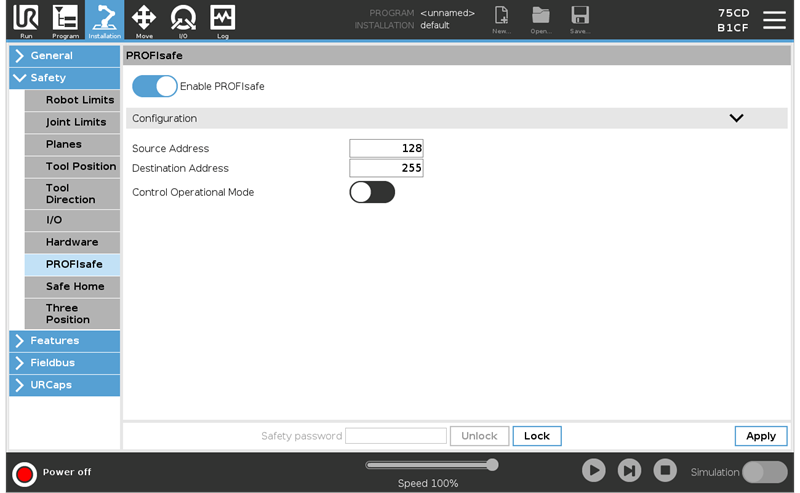
On this screen, a source address and destination address can be specified. These addresses are used by the robot and the safety PLC to identify each other. There is also an option to enable PROFIsafe PLC control of the robot Operational Mode.
Note: PROFIsafe is only available on robots with enabling license, which could be obtained by contacting a local sales representative. Once obtained, the PROFIsafe license can be downloaded on myUR.
PROFINET network changes
Note: When PROFINET/PROFISafe is enabled, the PROFINET controller (PLC) will control the configuration of the robot's network settings. This means that the network settings cannot be changed in PolyScope while PROFINET is enabled.
This change is implemented to conform with the PROFINET standard.
Safety Checksum
The Safety Checksum now consists of eight characters (letters/digits) instead of the previous four characters. Note that the eight character checksum is read left to right, top row first (whereas the four character checksum is read from top to bottom and left to right).
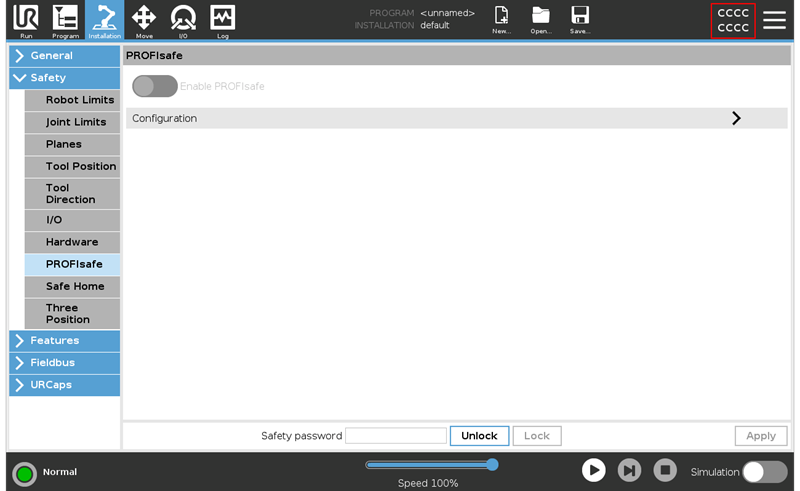
This change does not affect installations from previous PolyScope versions. After loading an old installation, the Safety Checksum will still be shown using the previous four character format. The new checksum format is only used for new installations or after applying changes to the safety configuration of an old installation.
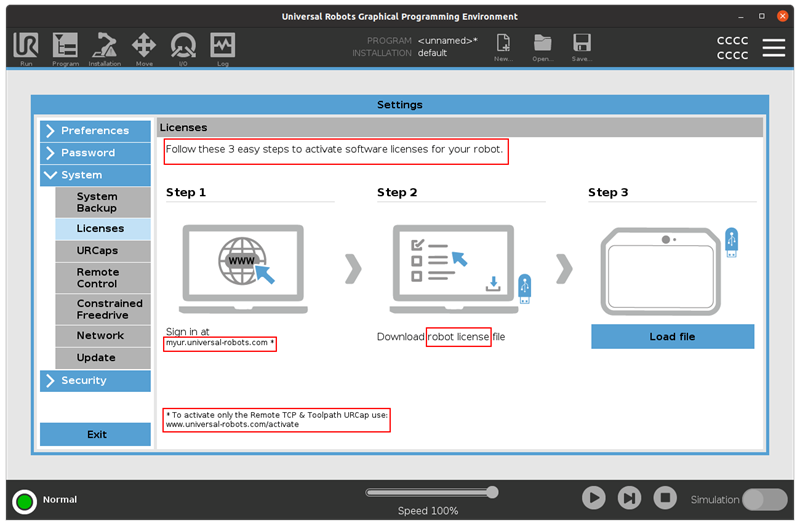
Licenses screen
The Robot Registration Settings screen has been renamed to Licenses.
The text on the screen now refers to activating software licenses for the robot (instead of robot registration) and using the myUR Customer Portal for registering robots and downloading a license file.
The Remote TCP & Toolpath URCap can still be activated using the www.universal-robots.com/activate URL. Note that using this URL, it is only possible to activate the Remote TCP & Toolpath URCap.
Controller
- The Robot Moving safety output is not set active (the signal is active low) when the robot is off. In earlier versions the "Robot Moving" safety output was set to active when the robot was not in running (powered off).
Bug Fixes
PolyScope GUI
- Fixed issue where changing the position of a linked waypoint would update the position of all linked waypoints to the same absolute position not taking the feature selection of their parent "Move" node into account
- Fixed issue where the "The program has not been saved. Do you want to save your changes?" or "Unsaved Installation Changes" dialog was not shown before restarting PolyScope when the program or installation had unsaved changes and the Restart button was pressed in the URCaps Settings screen (after installing/uninstalling a URCap).
- Fixed issue where PolyScope would freeze if the Operational Mode was changed while dragging the speed slider in Manual High Speed mode.
- Fixed issue where a compilation error in some situations could occur with a large program if the Play button was pressed two times quickly.
Controller
- Reduced the memory overhead of secondary programs, fixing some cases of "No Controller" errors. Particularly those related to URCaps retrying to send a secondary program.
- Changed semantics for Robot Moving safety output so it isn't active when the robot is off or when the robot is in IDLE and not moving.
- Fixed drift in Conveyor tracking/Path offsetting when a program has "wait" after blended waypoints.
- Corrected wrong handling of rotations during conveyor tracking/path offsetting.
- Fixed issue with braking from conveyor tracking/path offsetting when pausing or stopping in case speed scale is <100%
- Fixed issue where during interpreter mode the skipbuffer method in some conditions can cause an "Unknown error: ValueStack::pop"
- Fixed issue the where race condition occurs while multiple threads are used in XMLRPC client
- Fixed a memory leak, usually causing a no controller. The problem could be recognized from the following text in the controller log: "Global variables update lost. Queue full."
URSim
- Fixed issue where the PolyScope help was only available for one robot type.
- Analog Outputs now work in URSim.
Embedded
- Changed monitoring and reporting from IO supply on SCB to provide better information on how to resolve issues.
- Fixed issue where the tool would report a missing F/T sensor, even though the sensor worked as required
Manuals
Starting from this release the end-user warranty is no longer part of the User Manual. It is included in the user contract.
All enquiries about the end-user warranty should be directed to support@universal-robots.com or service.support@universal-robots.com
previous RELEASE NOTES:
- Release Notes Software Version 5.11
- Release Notes Software Version 5.10
- Release Notes Software Version 5.9
- Release Notes Software Version 5.8
- Release Notes Software Version 5.7
- Release Notes Software Version 5.6
- Release Notes Software Version 5.5
- Release Notes Software Version 5.4
- Release Notes Software Version 5.3
- Release Notes Software Version 5.2
- Release Notes Software Version 5.1